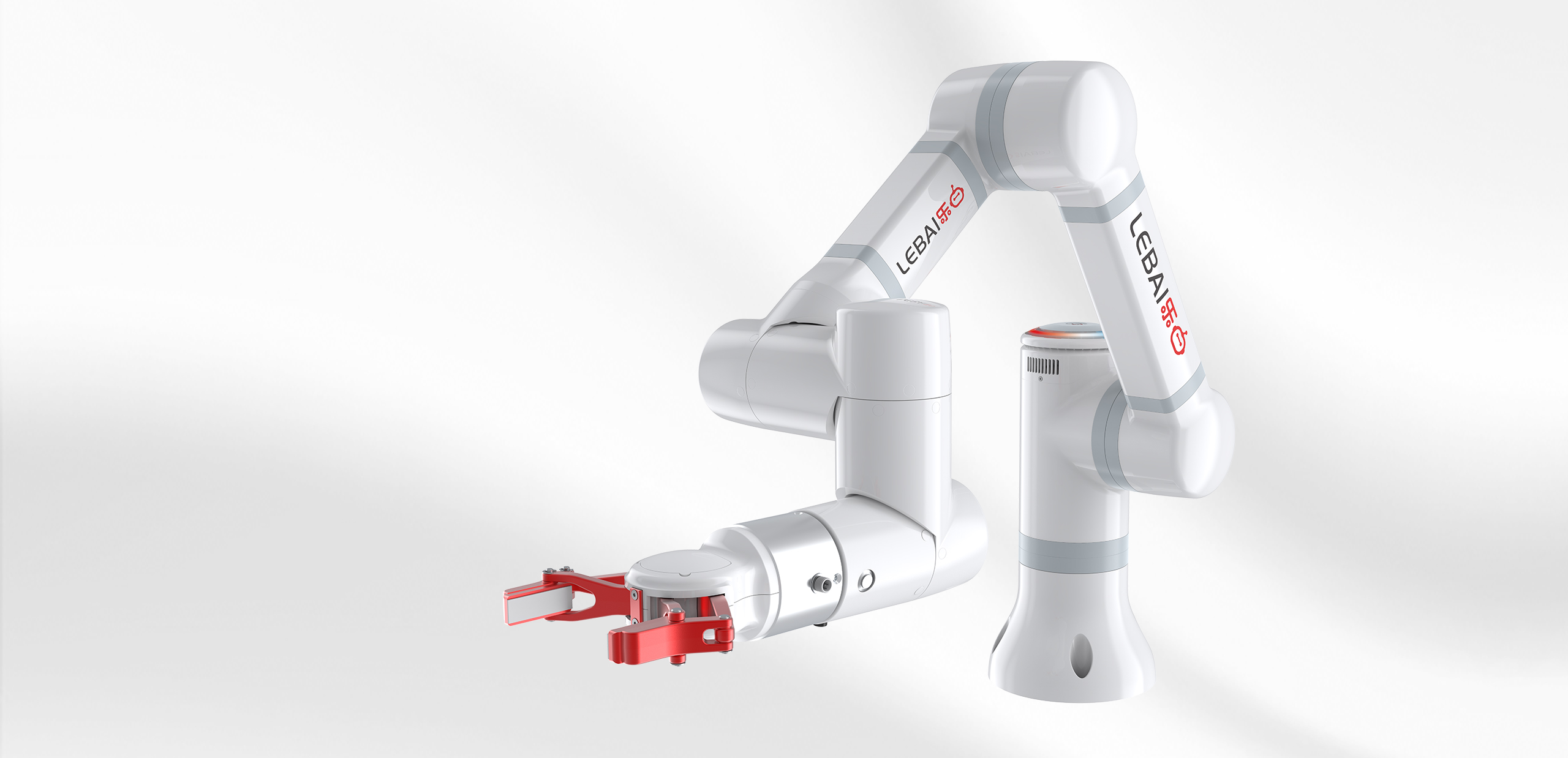
LM3-L1 Collaborative Robot
Product Introduction
LM3-L1 is a compact, lightweight collaborative robot with a lightweight body and a simple design. The maximum payload is 1kg. LM3-L1 has strong versatility and collaboration, and can be equipped with different types of end effectors to complete corresponding assembly, transportation, and other operations. It has a wide range of applications in life service, light industry logistics, education research, and other scenarios. The time axis editor designed by the Lebai team for the robot control system reduces the cost of user use and control of the robot, achieving easy-to-learn and easy-to-use operation experience; at the same time, it provides a rich range of control interface protocols at different levels, providing more convenience for the implementation of robot integration solutions.
Product Features
Lightweight Body
The LM3-L1 robot body and control box weigh less than 14kg, making it more convenient to use, install, and deploy.
Safe and Reliable
LM3-L1 supports collision safety protection. When an object is detected, the robot immediately stops/pauses, providing timely and effective safety guarantees to people/objects around it.
Joints Unlimited
All joints of LM3-L1 can achieve the function of unlimited dynamic range limit*, providing more possibilities for robot application scenarios.
Interactive Personalization
LM3-L1 supports scene and action style settings, providing various human-machine interactions such as voice, light, and hardware button operations, enhancing the robot’s ease of use and application efficiency.
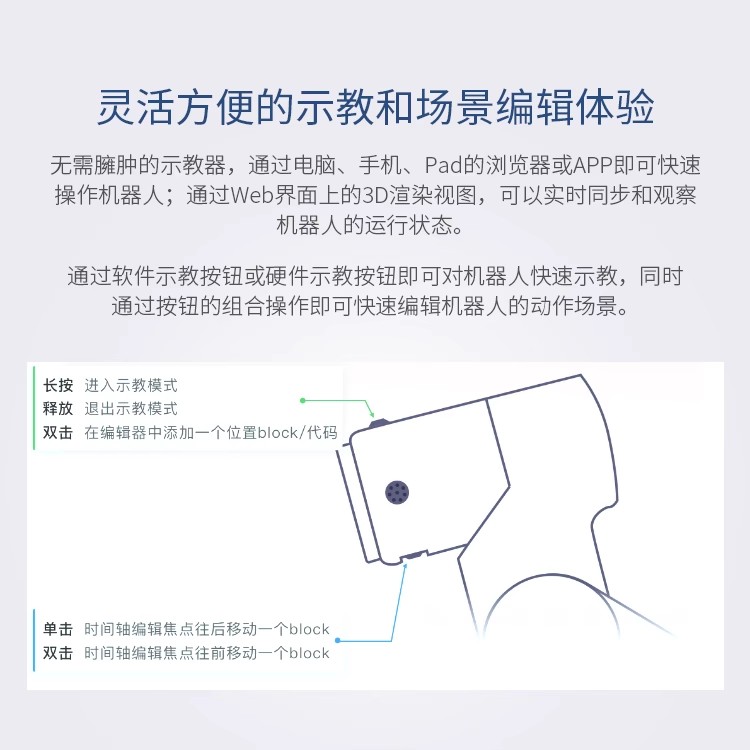
Easy to Use
No teaching box is required. The Lebai robot uses pull/drag teaching, which is convenient to operate the robot through a Web browser or APP. The Lebai team has independently developed a time axis editor, providing a low-threshold scenario editing experience.
High Extensibility
The Lebai robot supports a rich control protocol interface, which is convenient for联动和快速支持外部系统和设备,也可以更好地控制第三方扩展I/O设备。
Visual Programming Software
The code editor (supporting Python, Lua, C#, javascript, etc.) and time axis editor specially designed for the robot control system by Lebai team reduce the cost of user use and control of the robot, achieving easy-to-learn and easy-to-use operation experience; at the same time, it provides a rich range of control interface protocols at different levels, providing more convenience for the implementation of robot integration solutions.
API Control Documentation: https://help.lebai.ltd/api/
IO Control Documentation: https://help.lebai.ltd/sdk/io/
Modbus Documentation: https://help.lebai.ltd/sdk/web/

Visual Programming Software
Simple Teaching
Detailed Specifications
Degree of Freedom
Working Radius
Payload
Repeatability
Control Box Weight
Arm Weight
Basic Parameters
Joint Motion Range and Maximum Speed
| Joint | Motion Range | Maximum Speed(°/s) |
|---|---|---|
| Joint 1 | Unlimited | 180°/s |
| Joint 2 | Unlimited | 180°/s |
| Joint 3 | Unlimited | 180°/s |
| Joint 4 | Unlimited | 180°/s |
| Joint 5 | Unlimited | 180°/s |
| Joint 6 | Unlimited | 180°/s |
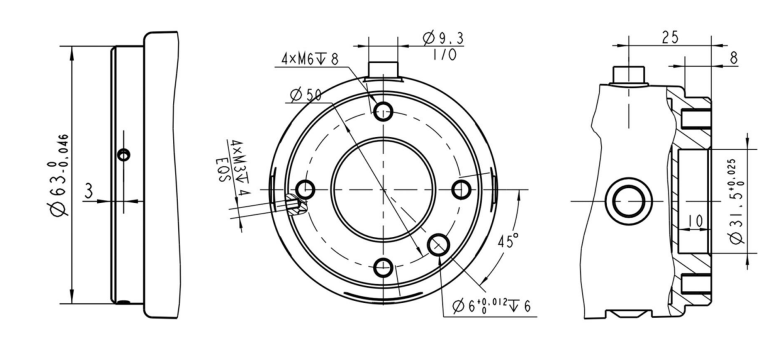
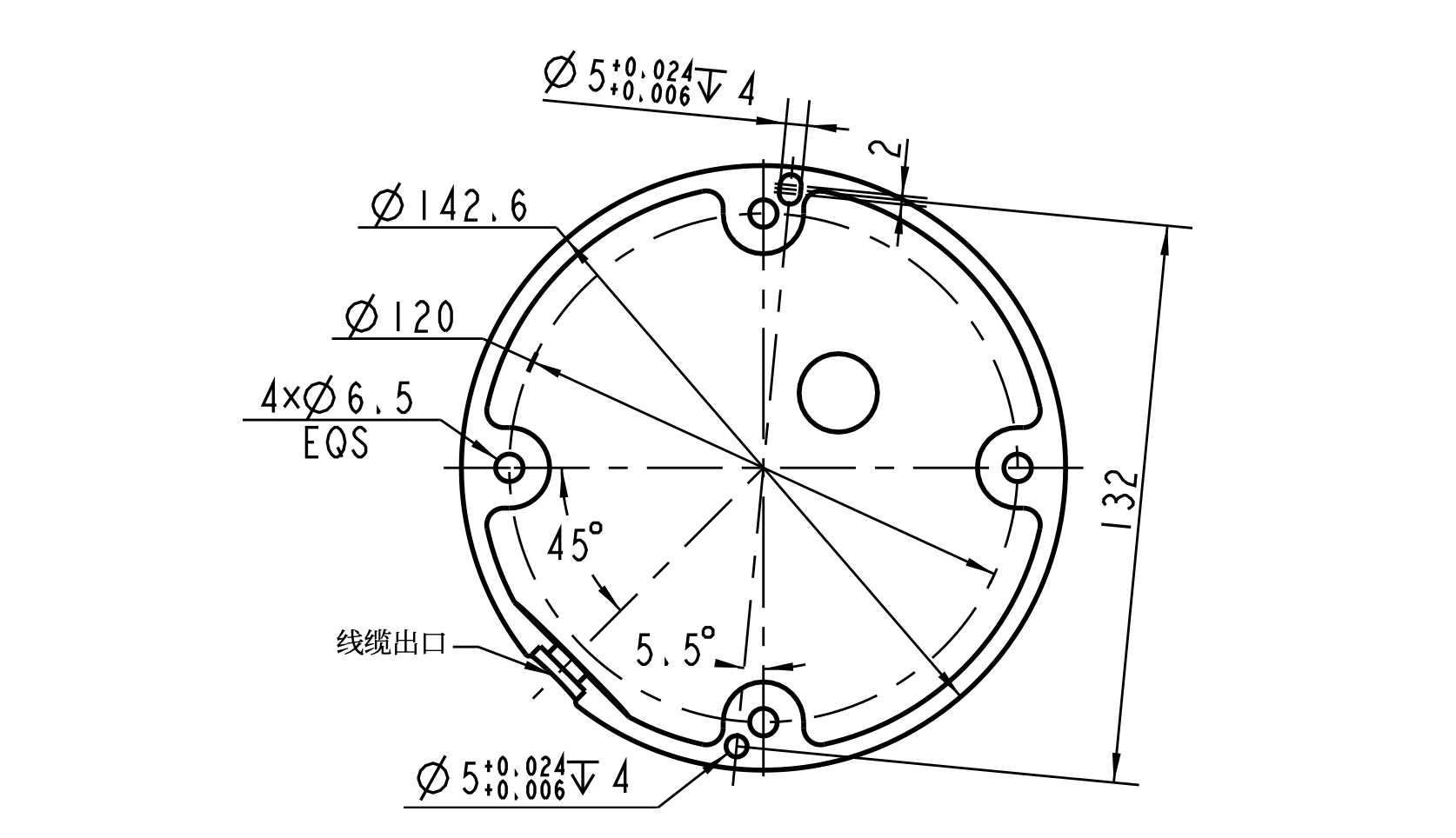
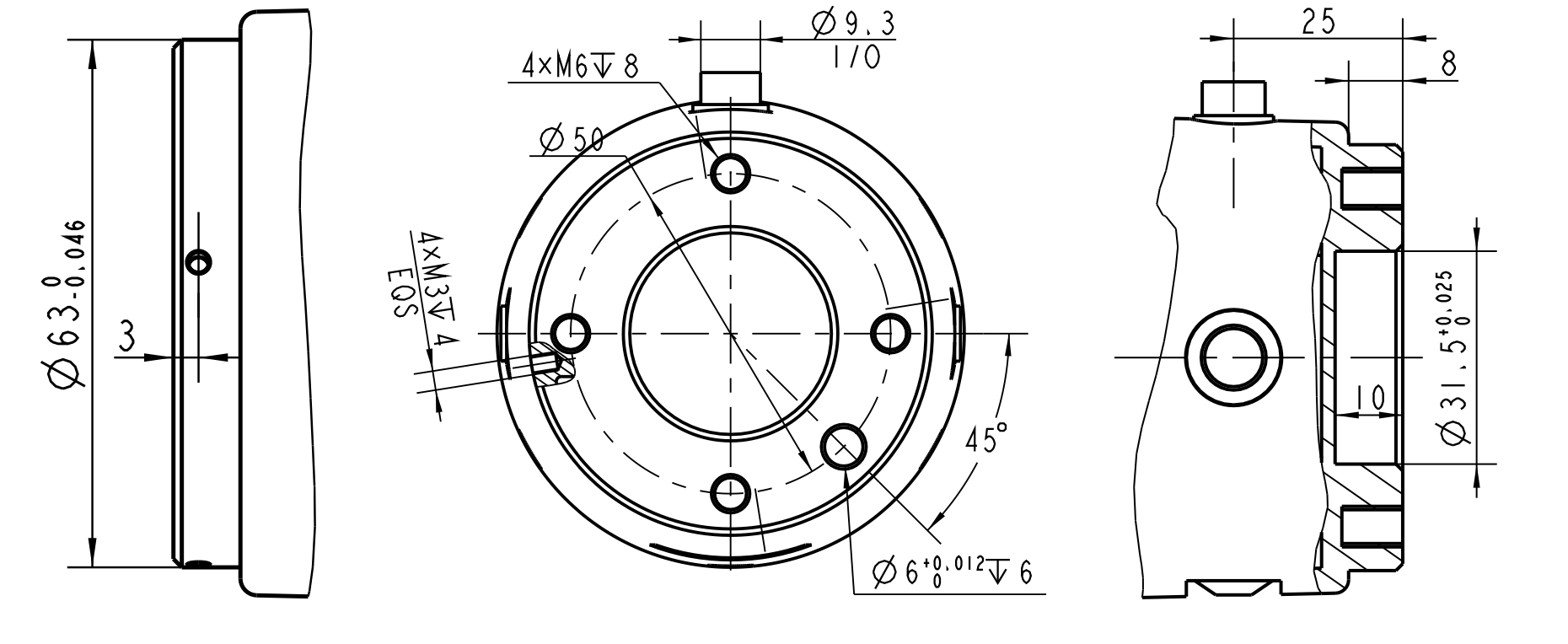
Installation Interface
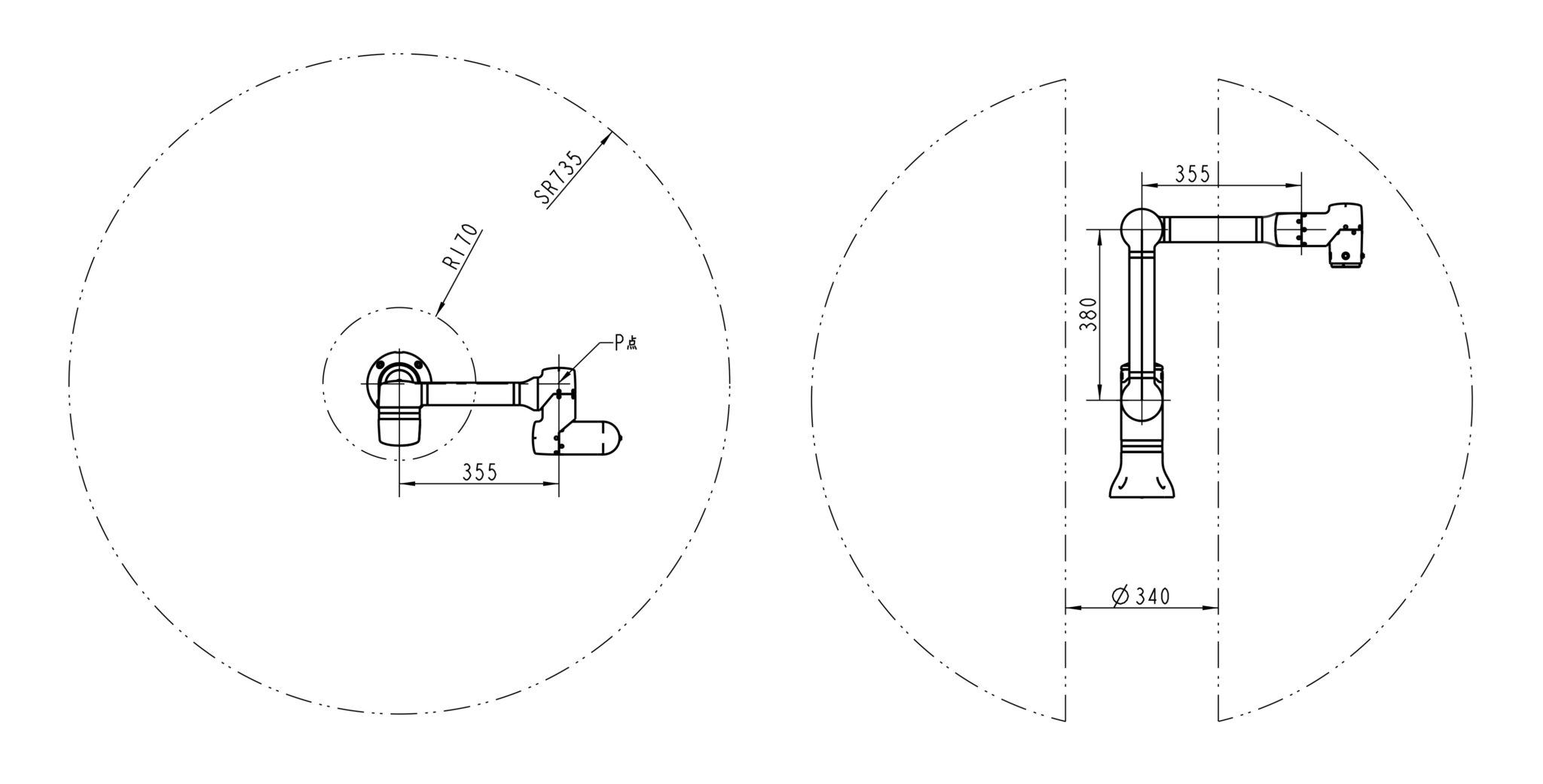
Motion Range
Installation Method

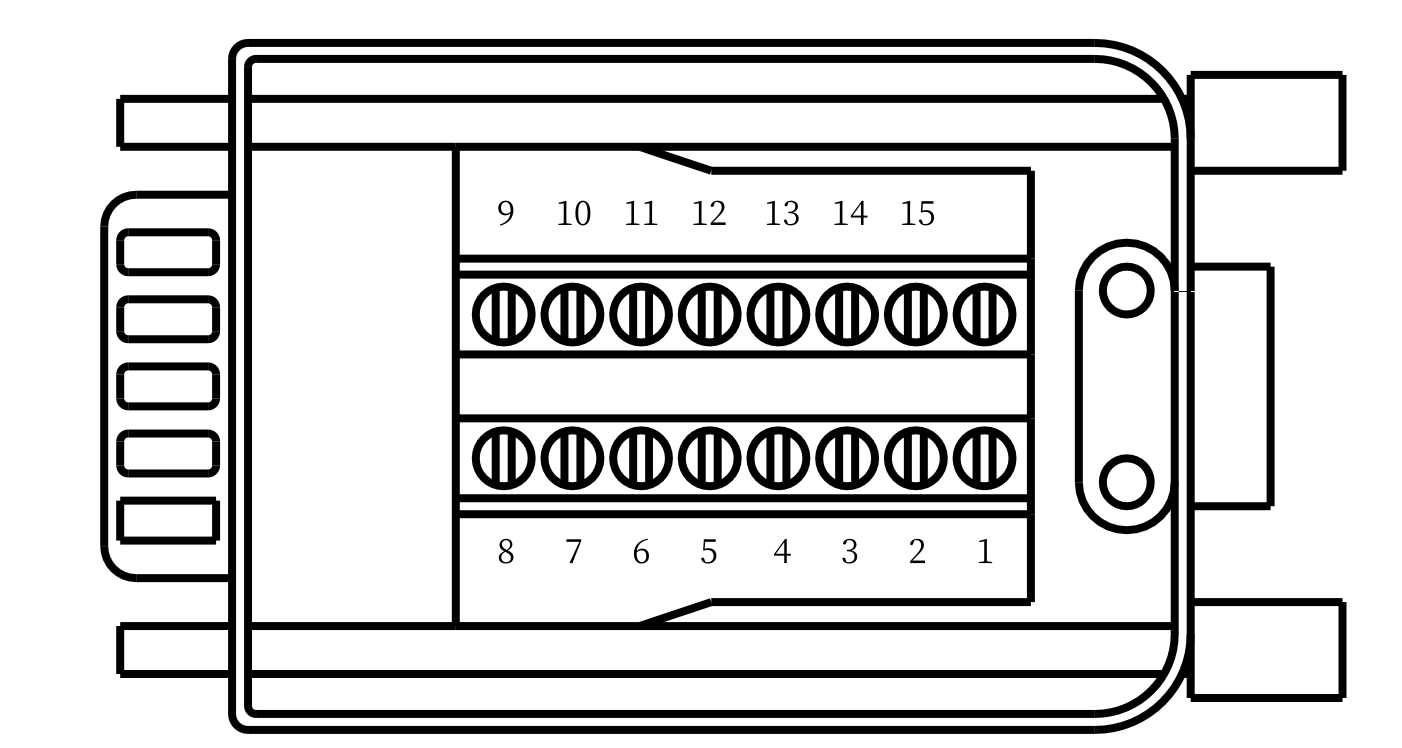
Control Box I/O Interface (DB15)
Flange I/O Interface