LM3-L1 协作机器人
产品介绍
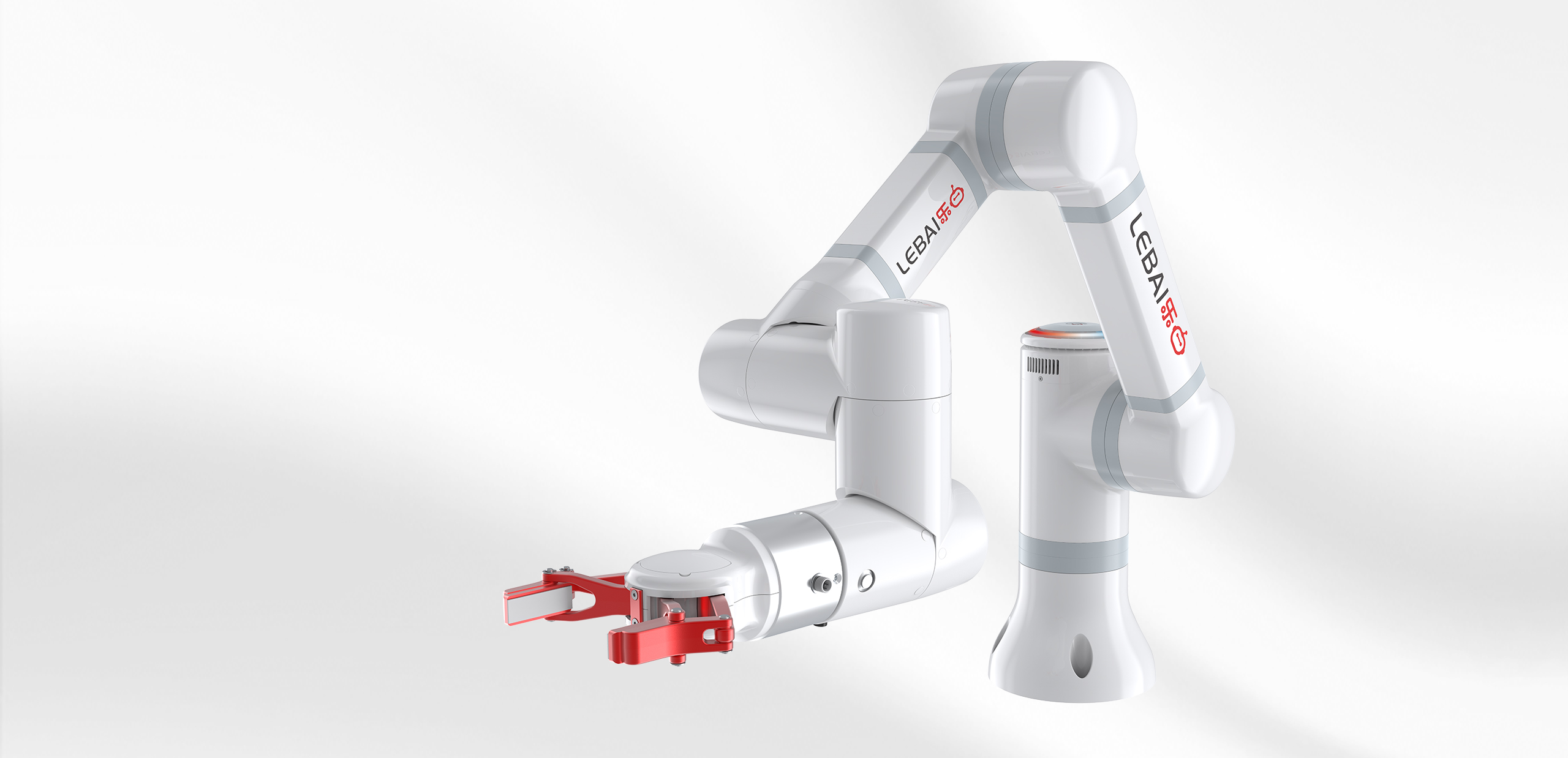
LM3-L1 是一款外形紧凑的轻型协作式机器人,采用轻量化机身和简约外观设计,末端最大负载 1kg。LM3-L1 具有较强的通用性与协作性,可搭载不同种类末端执行器,完成相应的装配、搬运等操作,在生活服务、轻工物流、教育研发等场景中应用前景广泛。 乐白团队为机器人控制系统量身定制的时间轴编辑器降低了用户使用和控制机器人的成本,实现了易学易用的操作体验;同时对外提供丰富的不同层级的控制接口协议,为机器人集成方案落地提供了更多的便利性。
产品组成
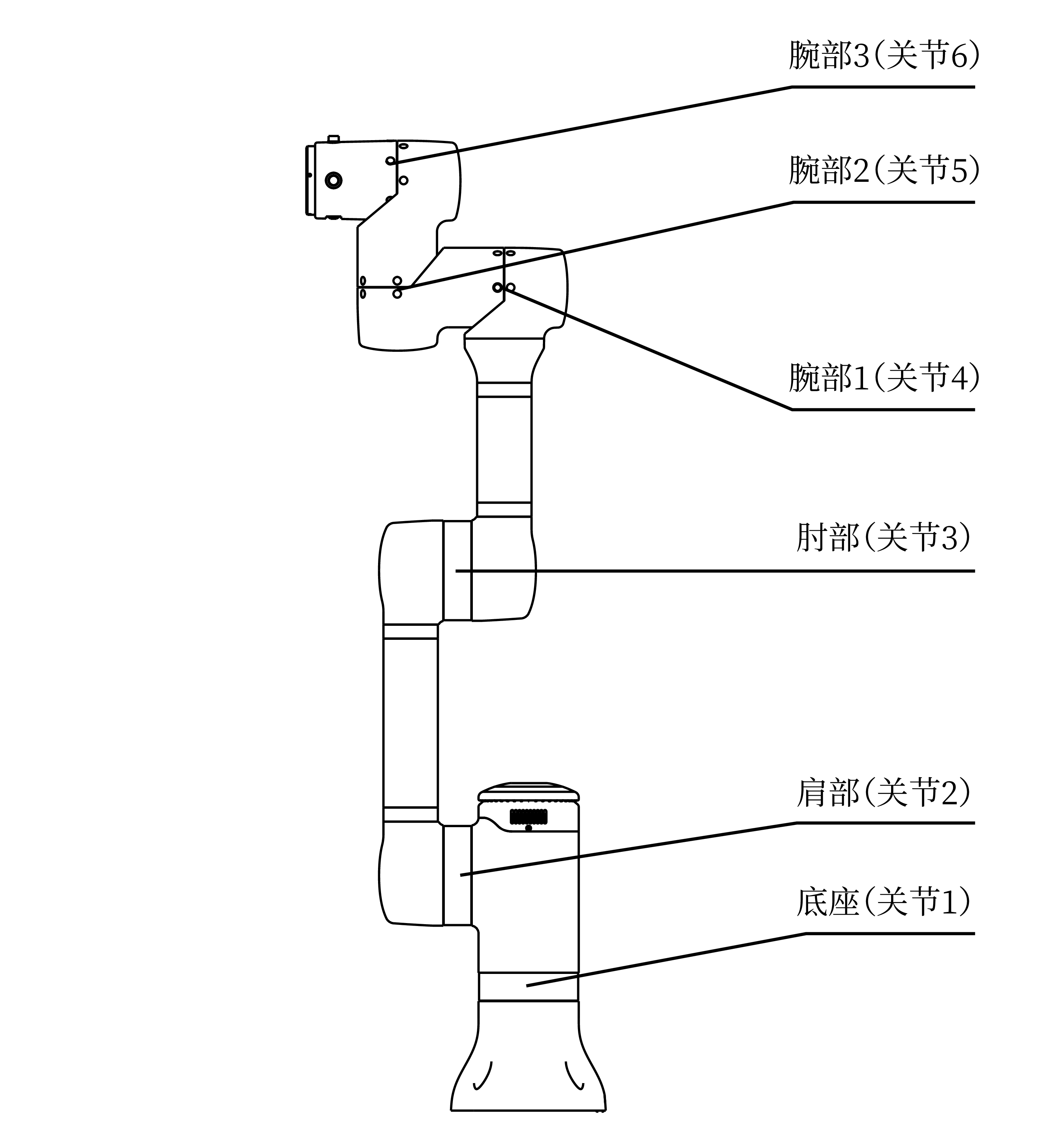
LM3-l1 系列机器人产品主要由机器人本体和控制箱组成。机器人本体共有 6 个旋转关节,即 6 个自由度(DoF)。如图所示,机器人关节包括底座(关节 1)、肩部(关节 2)、肘部(关节 3)、腕部 1(关节 4)、腕部 2(关节 5)和腕部 3(关节 6)。 机器人本体为机器人产品的执行机构,其中底座为机器人安装处,肩部和肘部可执行较大幅度动作,腕部 1 和腕部 2 可执行较精细动作,腕部 3 可以连接末端工具。

控制箱为机器人系统的控制部分,可控制机器人在工作空间中的位置、姿态,连接设备的电气输入和输出端。实际应用中为确保运行安全,通常需要在控制箱上外接急停开关(选配)。为方便使用,也可外接开关机按键(选配)。 控制箱通过机器人电缆与机器人连接。连接上电后,用户可通过电脑、平板、手机或其他图形化终端设备的浏览器访问机器人的 L Master 系统控制机器人,查看机器人的各种状态信息。
产品特色
轻量化机身
LM3 机器人本体与控制箱总重低于14kg,轻量化的机身在使用、安装、部署上都更为便捷。
安全有保障
LM3 支持碰撞安全防护,当检测到物体碰撞时,机器人立即停止/暂停,对周围的人/物提供及时有效的安全保证。
关节无限制
LM3 所有关节均可实现无限动范围限制*的功能,为机器人应用场景提供了更多可能性。
交互个性化
LM3 支持场景和动作样式设置,提供语音、灯光、硬件按钮操作等多种人机交互方式,提升了机器人易用性及应用效率。
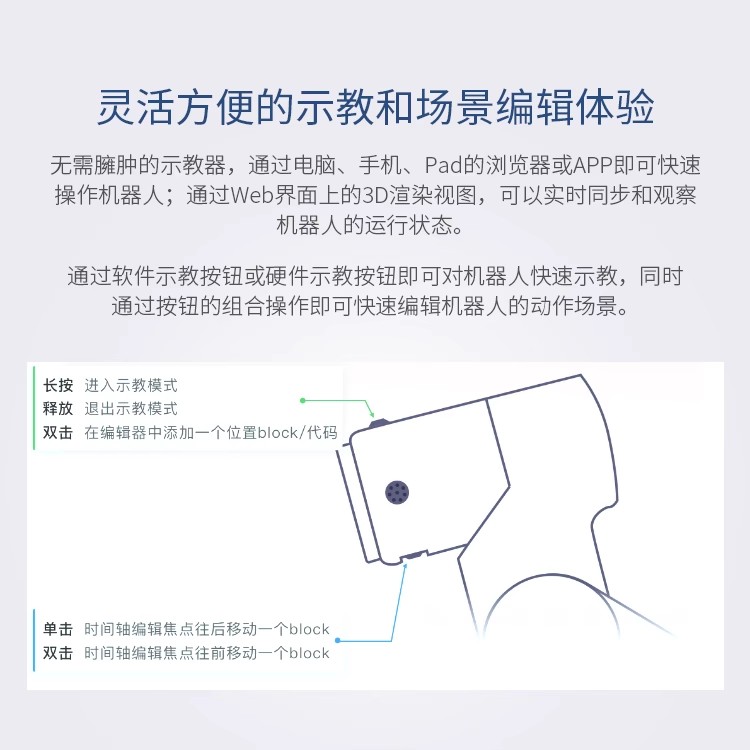
简洁易用
无需示教器,乐白机器人采用牵引/拖动示教,通过Web浏览器或APP即可方便操作机器人。乐白团队自主创新研发的时间轴编辑器,提供低门槛场景编辑体验。
高扩展性
乐白机器人支持丰富的控制协议接口,便于联动和快速支持外部系统和设备,也可以更好地控制第三方扩展I/O设备。
开发方式

本地开发
乐白机器人为机器人控制系统量身定制的代码编辑器和时间轴编辑器, 降低了用户使用和控制机器人的成本,实现了易学易用的操作体验。通过Web浏览器即可方便操作机器人,无需示教器。
外部开发
乐白机器人支持多种第三方开发方式,提供丰富的控制协议接口和SDK,便于快速集成外部系统和设备,满足不同开发环境和应用场景的需求。
SDK开发包
官方软件开发包,支持多种编程语言,提供完整的机器人控制接口, 可以直接通过python, C#, javascript来进行引入sdk包进行开发
https://help.lebai.ltd/sdk/Lua Socket
基于Lua脚本的Socket通信接口,支持TCP/UDP协议,轻量级集成方案, Lua Socket 服务支持使用基础 Lua 语法、Lua SDK和Lua API。
Lua Socket文档链接详细规格
自由度
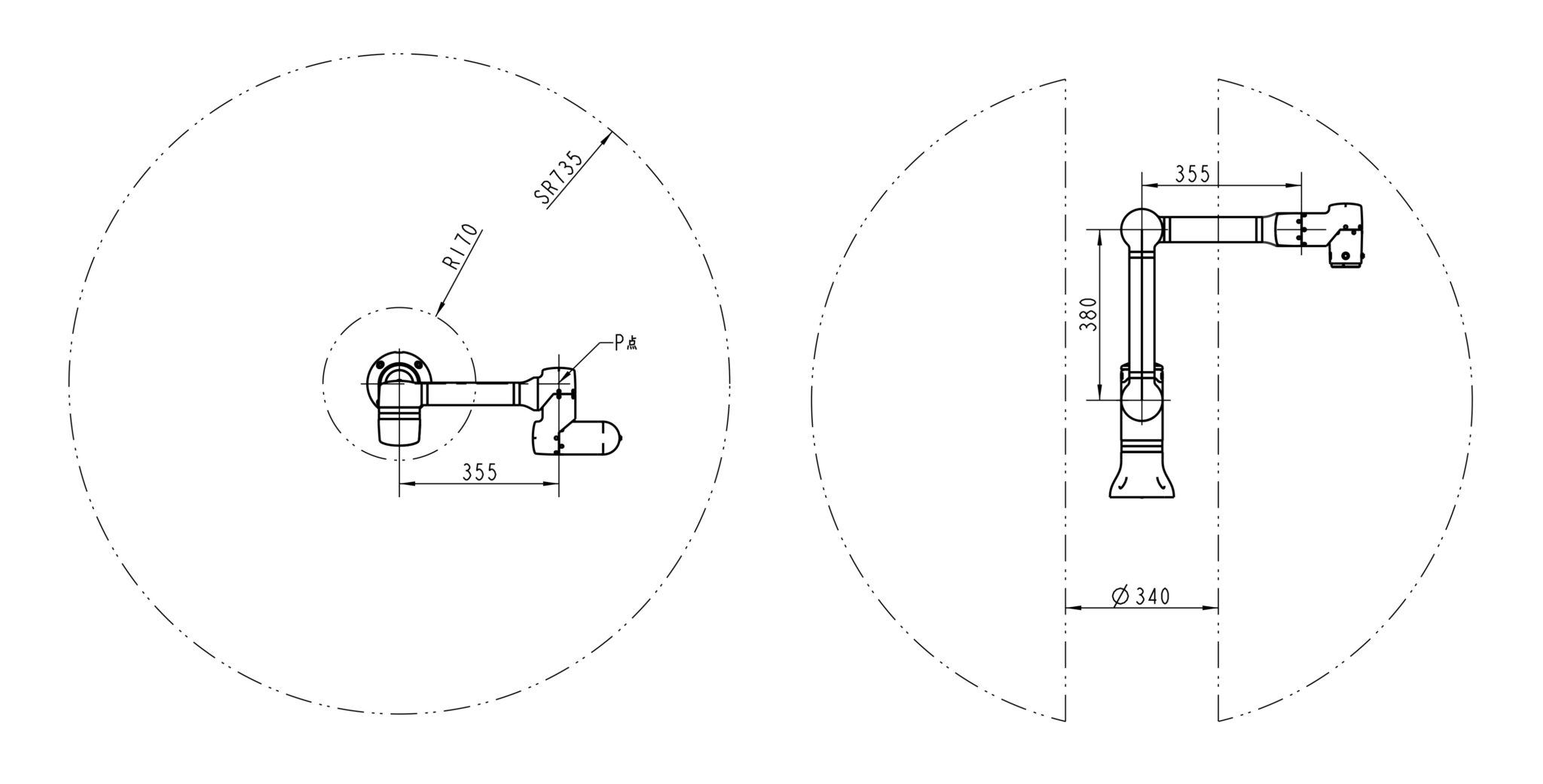
工作半径
有效负载
重复精度
机箱自重
手臂自重
基础参数
关节运动范围与最大速度
| 关节 | 运动范围 | 最大速度(°/s) |
|---|---|---|
| 关节1 | 无限制 | 180°/s |
| 关节2 | 无限制 | 180°/s |
| 关节3 | 无限制 | 180°/s |
| 关节4 | 无限制 | 180°/s |
| 关节5 | 无限制 | 180°/s |
| 关节6 | 无限制 | 180°/s |
运动范围
安装方式

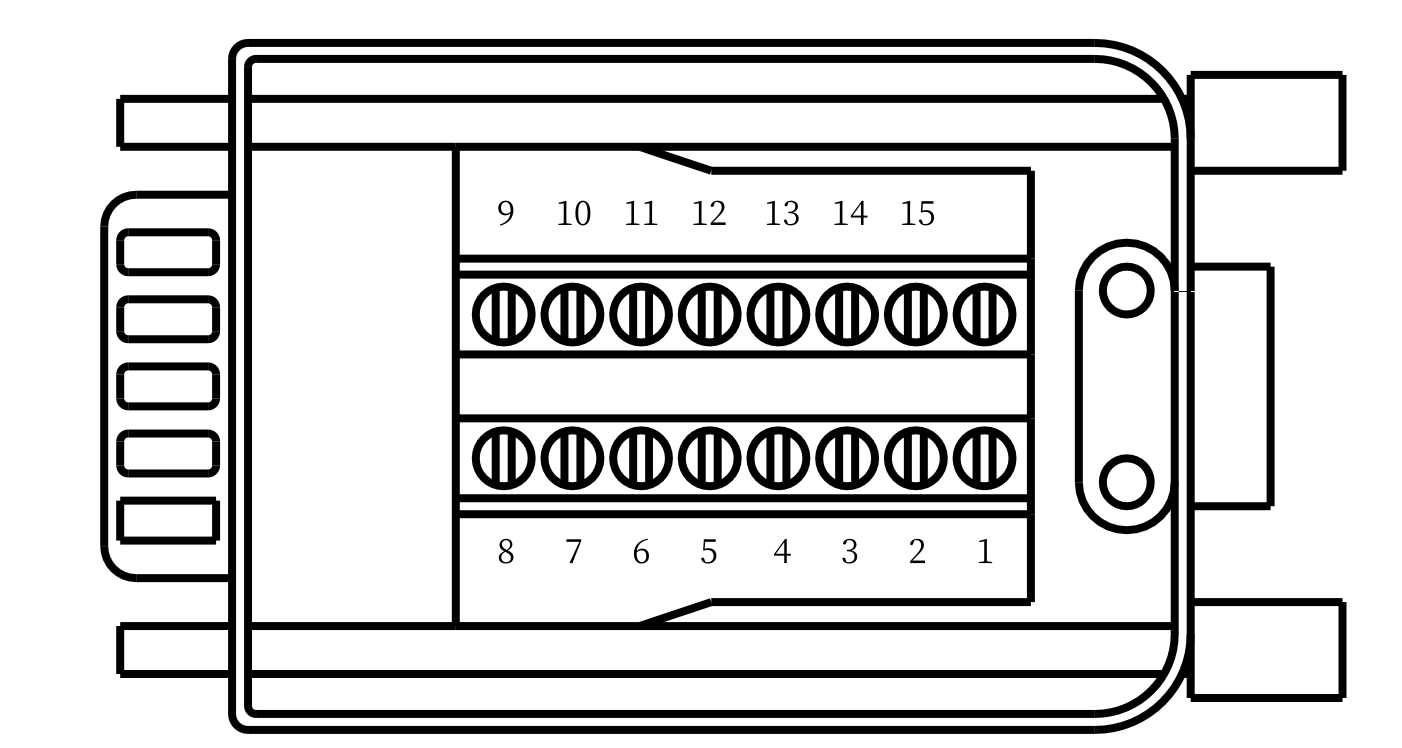
控制箱 I/O 接口(DB15)
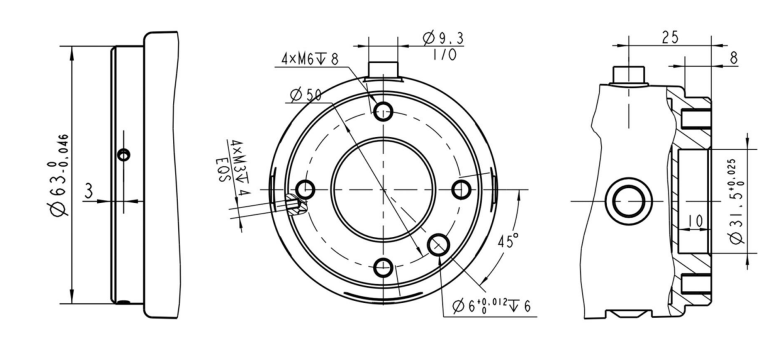
法兰 I/O 接口